This is a two part blog post that covers a lot of topics about a rather boring aspect of the RPI. I suspect that the vast majority of people using a RPI wouldn’t be interested in most of this stuff. But, there are a small number of people out there (like myself) who will no doubt find this stuff very useful.
This (the first of two) posts covers the booting process of an RPI. You need to have some idea of how this works to make your own images.
I have a RPI 3, some of this stuff may not be accurate for other models.
RPI Booting demystified
I have not been able to find any documentation on the bootloader that runs in the firmware but by trial and error, here is what I’ve found.
The firmware accesses the partition table on the MicroSD card which it assumes is an MS-DOS style partition table. The partition table is at the very beginning of the card and is part of the Master Boot Record (MBR). A good write up about this layout is found here [1].
The bootloader looks (it appears) for an MS-DOS LBA addressable partition. I have found that partition types 0x0C and 0x0E work. In order to boot reliably, I have also found that this must be the first partition on the disk.
RPI’s don’t use bootstrap code on the MicroSD card.
This is very important to if you wish to make your own images; it makes that process a whole lot simpler. The bootloader in firmware looks instead at this small MS-DOS partition to find a kernel, all the drivers it needs, and a pointer to the root file system.
The bootloader parses the cmdline.txt file to find the root partition. Here is a small portion of the cmdline.txt on one of my RPIs.
root=/dev/mmcblk0p2 rootfstype=ext4
The RPI addresses the MicroSD as /dev/mmcblk0 and the partitions on it are (in order) addressed as /dev/mmcblk0p1, /dev/mmcblk0p2, and so on.
The cmdline.txt file identifies the root partition either by providing this name, or by specifying a partition UUID, or a label. In the example above, cmdline.txt points to the second partition on the MicroSD card.
I found exactly one place that appears to document this in some detail, that is here[2].
Troubleshooting the boot process
When you power on the RPI, the red light indicates power. The green light (ACT/D5) indicates SD card access. If the red light comes on but the green one doesn’t it means that the firmware did not find a card it liked. This has been the most common problem described by people online.
If you have the tools to debug it, here are some things that I have found to be helpful.
If you can put this MicroSD card into a machine where you can mount it (and hopefully that machine is Linux based; if it is Windows based, my apologies, I can’t help you).
lsblk will help you identify the device. For example on my machine it is /dev/sdc. Here is the output of lsblk on my machine. The MicroSD card is shown in bold letters.
$ lsblk
NAME MAJ:MIN RM SIZE RO TYPE MOUNTPOINT
sda 8:0 0 150G 0 disk
├─sda1 8:1 0 134G 0 part /
├─sda2 8:2 0 1K 0 part
└─sda5 8:5 0 16G 0 part [SWAP]
sdc 8:32 1 29.7G 0 disk
├─sdc1 8:33 1 100M 0 part
└─sdc2 8:34 1 29.6G 0 part
sr0 11:0 1 1024M 0 rom
And (as root) runnint ‘parted’ on that device gives me
(parted) unit b
(parted) print
Model: SD SL16G (sd/mmc)
Disk /dev/mmcblk0: 15931539456B
Sector size (logical/physical): 512B/512B
Partition Table: msdos
Disk Flags:
Number Start End Size Type File system Flags
1 1048576B 1529000447B 1527951872B primary fat32 lba
[...]
As highlighted above, the partition table is ‘msdos’ and the partition is shown as ‘fat32 lba’. Both of these are essential.
Here are some examples of a closer look at the MicroSD card using hexdump.
# sudo dd if=/dev/sdc of=/tmp/head bs=4K count=1
# hexdump -C /tmp/head
00000000 fa b8 00 10 8e d0 bc 00 b0 b8 00 00 8e d8 8e c0 |................|
00000010 fb be 00 7c bf 00 06 b9 00 02 f3 a4 ea 21 06 00 |...|.........!..|
00000020 00 be be 07 38 04 75 0b 83 c6 10 81 fe fe 07 75 |....8.u........u|
00000030 f3 eb 16 b4 02 b0 01 bb 00 7c b2 80 8a 74 01 8b |.........|...t..|
00000040 4c 02 cd 13 ea 00 7c 00 00 eb fe 00 00 00 00 00 |L.....|.........|
00000050 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 |................|
*
000001b0 00 00 00 00 00 00 00 00 d4 5c 0b 00 00 00 00 00 |.........\......|
000001c0 01 20 0e 03 d0 ff 00 08 00 00 59 89 2d 00 00 03 |. ........Y.-...|
000001d0 d0 ff 05 03 d0 ff 59 91 2d 00 a7 3a ad 01 00 00 |......Y.-..:....|
000001e0 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 |................|
[...]
The thing I’ve highlighted is the byte at offset 0x1c2 into the card, here it says 0x0E. That is the code for a Fat16 LBA mapped partition table.
On another RPI, I have the following.
$ sudo dd if=/dev/sdc of=/tmp/header bs=4K count=1
$ hexdump -C /tmp/header
00000000 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 |................|
*
000001b0 00 00 00 00 00 00 00 00 99 56 4c 6b 00 00 80 20 |.........VLk... |
000001c0 21 00 0c eb 17 0c 00 08 00 00 00 20 03 00 00 eb |!.......... ....|
000001d0 17 0c 83 f9 71 05 00 28 03 00 00 d0 3c 00 00 00 |....q..(....<...|
000001e0 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 |................|
000001f0 00 00 00 00 00 00 00 00 00 00 00 00 00 00 55 aa |..............U.|
00000200 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 |................|
*
00001000
Both of these work well for me. If you don’t see one of these, look up the number you do see here [3]. If it is not a MS-DOS LBA-mapped partition type, you have a problem.
If you made your own SD card and you have the image file handy, you can inspect it to see what it has as follows.
Here is an image I built for myself.
$ ls -l raspbian.raw
-rw-rw-r-- 1 amrith amrith 2147483648 Jul 16 22:26 raspbian.raw
It is a 2GB Raspbian clone that I use for some of my machines. It contains two partitions, the output below shows offsets and sizes in Bytes because of the ‘unit b’ command.
$ sudo parted ./raspbian.raw unit b print
Model: (file)
Disk /home/amrith/images/raspbian.raw: 2147483648B
Sector size (logical/physical): 512B/512B
Partition Table: msdos
Disk Flags:
Number Start End Size Type File system Flags
1 1048576B 105906175B 104857600B primary fat32 boot, lba
2 105906176B 2146435071B 2040528896B primary ext4
Armed with that information, you can now do this.
$ sudo losetup --show -o 1048576 -f ./raspbian.raw
/dev/loop0
$ sudo losetup --show -o 105906176 -f ./raspbian.raw
/dev/loop1
$ mkdir /tmp/boot
$ mkdir /tmp/root
$ sudo mount /dev/loop0 /tmp/boot
$ sudo mount /dev/loop1 /tmp/root
/tmp/boot and /tmp/root now mount the MS-DOS and ext4 partitions in the image using loopback file systems. This is very useful in debugging. You can, of course, do the exact same thing on a MicroSD card and make corrections to the card if you so desire.
Making your own images
The next installment of this blog post will describe how you can build your own images.
References
[1] https://en.wikipedia.org/wiki/Master_boot_record
[2] https://github.com/raspberrypi/noobs/wiki/Standalone-partitioning-explained
[3] http://www.win.tue.nl/~aeb/partitions/partition_types-1.html

 le I was receiving mobile alerts that there was motion, I got no notification(s) on what the cause was. The expected behavior was that I would receive alerts on my mobile device, and explanations as email. For example, the alert would read “Motion detected, camera-5 <time>”. The explanation would be something like “NORMAL: camera-5 motion detected at <time> – timer activated light change”, “NORMAL: camera-3 motion detected at <time> – garage door closed”, or “WARNING: camera-4 motion detected at <time> – unknown pattern”.
le I was receiving mobile alerts that there was motion, I got no notification(s) on what the cause was. The expected behavior was that I would receive alerts on my mobile device, and explanations as email. For example, the alert would read “Motion detected, camera-5 <time>”. The explanation would be something like “NORMAL: camera-5 motion detected at <time> – timer activated light change”, “NORMAL: camera-3 motion detected at <time> – garage door closed”, or “WARNING: camera-4 motion detected at <time> – unknown pattern”. yment,
yment, 

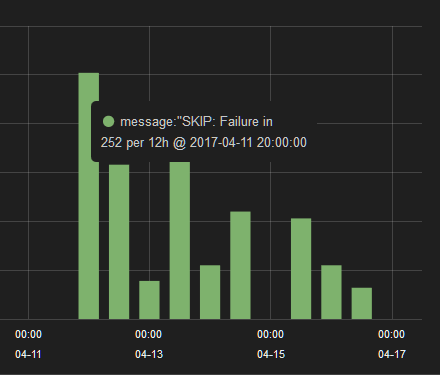
 It annoys me to no end when people present graphs like this one. Yes, the numbers do in fact add up to 100% but does it make any sense to have so many digits after the decimal when in reality this is based on a sample size of 6? Wouldn’t 1/2, 1/3, 1/6 have sufficed? What about 0.5, 0.33 and 0.67. Do you really really have to go to all those decimal places?
It annoys me to no end when people present graphs like this one. Yes, the numbers do in fact add up to 100% but does it make any sense to have so many digits after the decimal when in reality this is based on a sample size of 6? Wouldn’t 1/2, 1/3, 1/6 have sufficed? What about 0.5, 0.33 and 0.67. Do you really really have to go to all those decimal places?





















 so little natural light). There were several religious ceremonies, a civil ceremony, and lots of food, and drink, and partying as well.
so little natural light). There were several religious ceremonies, a civil ceremony, and lots of food, and drink, and partying as well. post-processing that would was much easier with RAW. For example, some of them required significant color (temperature) and exposure adjustment.
post-processing that would was much easier with RAW. For example, some of them required significant color (temperature) and exposure adjustment.